Getting Started: Using the “USB
Device – Bootloaders”
Overview:
In many
types of applications, it is often desirable to be able to field update the firmware
used on the flash microcontroller, such as to perform bug fixes, or to provide
new features. Microchip’s flash memory
based USB microcontrollers have self programming capability, and are therefore
able to perform self updates of application firmware. This can be achieved by downloading a new
firmware image (.hex file) through the USB port, and using the
microcontroller’s self programming ability to update the flash memory.
The
MCHPFSUSB distribution comes with two separate USB bootloader example
applications (and corresponding firmware projects): “HID Bootloader” and
“MCHPUSB Bootloader”.
As of
this release the “HID Bootloader” is intended to be used with all released
Microchip USB flash microcontrollers, to include all devices from the following
microcontroller families:
1. PIC18F14K50 Family
2. PIC18F46J50 Family
3. PIC18F4450 Family
4. PIC18F4550 Family (and PIC18F4553
Family)
5. PIC18F87J50 Family
6. PIC24FJ256GB110 Family
7. PIC24FJ64GB004 Family
8. PIC32MX460F512L Family
The
bootloader comes with full firmware and PC software source code, and is
intended to be easily modified to support future Microchip USB
microcontrollers. The PC software is
designed to be independent of the microcontroller device being used, so only
one PC application is needed to update any of the microcontroller devices.
The
“MCHPUSB Bootloader” is a custom device class (requires driver installation)
bootloader. The HID Bootloader is
superior in a number of ways, and if developing a new application, it is
recommended to consider developing with the HID bootloader instead. The MCHPUSB bootloader only supports the
following microcontrollers: PIC18F4550, PIC18F4455, PIC18F2550, PIC18F2455,
PIC18F4553, PIC18F4458, PIC18F2553, PIC18F2458, PIC18F4450, PIC18F2450.
HID Bootloader:
The HID
bootloader related source code can be found in the following location
“<install directory>\USB Device - Bootloaders\HID - Bootloader”. The bootloader relies on the HID class
protocol. Therefore, no driver
installation is necessary, as common operating systems ship with HID class USB
drivers built in.
As
configured by default, the bootloader has the following characteristics:
Two USB Stacks Approach: The bootloader firmware contains
all of the code needed for self programming, as well as all of the necessary code
to enumerate as a HID class USB device.
The HID
bootloader firmware is an entirely stand alone MPLAB® IDE based project. The “main application” firmware should be a
separate MPLAB IDE based project altogether.
The main application firmware is intended to be entirely independent of
the bootloader. This requires that the
main application should also contain a fully functional and complete USB stack. However, only one of the USB stacks is used
at any given time.
With
this approach, the main application firmware need not be a HID class device
(nor does it need to be a “composite” device).
In order to switch between the main application and the USB bootloader,
the device “functionally detaches” itself from the USB bus (by temporarily
turning off the pull up resistor), and then re-enumerates as the other firmware
project.
Bootloader Entry Method:
As currently configured, the bootloader firmware resides in program
memory in address range 0x00-0xFFF (on PIC18 devices, different for PIC24 and
PIC32 devices). Almost immediately after
coming out of reset, the bootloader firmware checks an I/O pin. If the I/O pin reads logic low, the microcontroller
will enter the bootloader firmware. If
the I/O pin is logic high, the bootloader will immediately exit the bootloader
and go to the main application firmware “reset vector”. The specific I/O pin that will be checked is
different for the various versions of the firmware projects. As configured by default, when used with one
of the Microchip USB related demonstration boards/platforms, the I/O pin that
is checked will have a pushbutton attached to it.
In other
words, at startup the bootloader effectively does this:
//Device
powers up, and comes out of POR
if(I/O pin pushbutton is not pressed) --> goto 0x1000 //main application
“reset vector”
if(I/O pin pushbutton is pressed) --> goto/stay in the HID bootloader
firmware.
Effectively,
the “reset” vector for the main application firmware is at address 0x1000. In the main application firmware project, the
user should place a “goto _startup” at address 0x1000. This will allow the C initializer code to
execute, which will initialize things like the software stack pointers and any
user “idata” variables. For an example, see one of the USB device
firmware projects, such as the “HID - Mouse” project. By default, most of the project varients are already configured to be able to generate .hex
files that can be used with the HID bootloader.
In the
MCHPFSUSB v2.4 release, the PIC18F87J50 family and PIC18F46J50 family versions
of the HID bootloader firmware also contains an alternative software only entry
method into the bootloader. If executing
the main application (non-bootloader) software, the main application may enter
the bootloader by:
1. Clearing the global interrupt enable
bit (INTCON<GIEH>
2. Execute the instruction: “_asm goto
0x001C _endasm”
It is
not necessary to have the I/O pin in the logic low state when using this
software entry method.
Vector Remapping:
PIC18:
As currently configured, the bootloader occupies the address range
0x00-0xFFF (on PIC18), which means it occupies the PIC18 reset, high priority,
and low priority interrupt vector locations. The bootloader firmware itself does not
enable or use interrupts. In order to
make interrupts available for use by the main application firmware, the
interrupt vectors are effectively “remapped” by placing goto
instructions at the actual vector locations.
In other words:
Address
0x08 (high priority interrupt vector), contains a “goto
0x1008”.
Address
0x18 (low priority interrupt vector), contains a “goto
0x1018”.
For
example, if a high priority interrupt is enabled and used in the main application
firmware, the following will occur:
1. Main application enables the interrupt source.
2. Sometime later, the interrupt event occurs.
3. Microcontroller PC jumps to 0x08.
4. Microcontroller executes a “goto 0x1008”.
5. Microcontroller executes the main application
interrupt handler routine, which has an entry point at address 0x1008. (Note: The interrupt handler routine itself
is not required to be at address 0x1008, instead another bra/goto may optionally be located at 0x1008 to get to the real
handler routine)
PIC24F:
As currently configured, the bootloader occupies the address range
0x0000 – 0x1400, which means it occupies the PIC24F reset, interrupt, and
alternate interrupt vector locations. The
bootloader firmware itself does not enable or use interrupts. In order to make interrupts available for use
by the main application firmware, the interrupt vectors are effectively “remapped”
by placing goto instructions at the actual vector
locations. In other words:
Address
0x0006 (OscillatorFailure interrupt vector), contains
a “goto 0x1408”.
Address
0x0008 (AddressError interrupt vector), contains a “goto 0x140C”.
Etc.
For
example, if a OscillatorFailure
interrupt is enabled and used by the main application firmware, the following
will occur:
1. Main
application enables the interrupt source.
2.
Sometime later, the interrupt event occurs.
3.
Microcontroller jumps to 0x0006.
4. Microcontroller
executes a “goto 0x1408”
5.
Microcontroller executes a “goto _OscillatorFailure”
instruction that will jump to the appropriately defined interrupt handler (or
the DefaultInterrupt if the interrupt handler is not
defined. This jump is located in the
modified linker (.gld) file that is used with the
application.
In order
to appropriately remap the interrupts, the appropriate *.gld
file must be copied from the “Application Linker Files” folder to the project
folder and attach it to the project.
Note: When using the HID bootloader for
PIC32 only (not applicable to other devices), it is important to modify the
procdefs.ld file to relocate the sections of code that will hold the bootloader
and those sections that will hold the user application.
Example modified procdefs.ld files have been provided with each project. This file is currently named
“Procdefs.ld.boot”. When using the
example project with the bootloader it is required to remove the “.boot”
section of the file. This will allow
MPLAB to use this file instead of the default linker file. Once the linker file is renamed, however, the
project will no longer work without the bootloader. Please rename the file in order to get the
project working again with PIC32.
Memory Map Summary (PIC18): As configured by default, the HID bootloader
firmware uses the below memory mapping.
The memory map can readily be modified by editing the HID bootloader
firmware project. It should not be
necessary to modify the PC application source code to change the memory
map.
0x000-0xFFF
- Occupied by the HID bootloader firmware
·
0x08
(high priority interrupt vector) contains a “goto 0x1008” instruction
·
0x18
(low priority interrupt vector) contains a “goto 0x1018” instruction
·
0x1C
is a main application firmware software only entry point into the bootloader
(this entry point is currently implemented on the PIC18F87J50 family and
PIC18F46J50 family versions of the firmware)
0x1000-(end
of device flash memory) – Available for use by the main application firmware
·
If
programming in C18, normally should place a “goto _startup” instruction at
address 0x1000, to allow the C initializer to run
Using the HID Bootloader PC
Application: All variants of the HID Bootloader firmware
are intended to interface with the “HIDBootLoader.exe” PC application.
Before
you can run the HIDBootLoader.exe executable, you will need to have the
Microsoft® .NET Framework Version 2.0 Redistributable Package (later versions
probably okay, but not tested) installed on your computer. Programs which were built in the Visual Studio®
.NET languages require the .NET redistributable package in order to run. The redistributable package can be freely
downloaded from Microsoft’s website.
Users of Windows Vista® and Windows 7 operating systems will not need to
install the .NET framework, as it comes pre-installed as part of the operating
system.
The
source code for the HIDBootLoader.exe file was created in Microsoft Visual C++®
2005 Express Edition. The source code
can be found in the “<Install Directory>\USB USB Device - Bootloaders\HID
- Bootloader\HID Bootloader - PC Software” directory. Microsoft currently distributes Visual C++
2005 Express Edition for free, and can be downloaded from Microsoft’s
website. When downloading Microsoft
Visual C++ 2005 Express Edition, also make sure to download and install the
Platform SDK, and follow Microsoft’s instructions for integrating it with the
development environment.
It is
not necessary to install either Microsoft Visual C++ 2005 or the Platform SDK
in order to use the HID Bootloader. These are only required in order to modify or
recompile the PC software source code.
To run
the application, simply double click on the executable, which can be found in
the following directory: “<Install Directory>\USB USB Device - Bootloaders\HID
– Bootloader”. Upon launching the
application, a window like that shown below should appear:
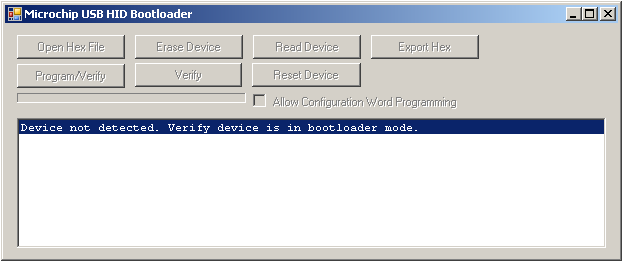
If the
application fails to launch, but instead causes a non-descript error message
pop up box to appear, it is likely that the .NET framework redistributable has
not been installed. Please install the
.NET framework and try again.
Upon
launch, the HIDBootLoader.exe program will do a search, looking for HID class
devices with VID = 0x04D8, and PID = 0x003C.
This is the same VID/PID that is used in the HID Bootloader firmware
projects, which is found in the following directory: “<Install
Directory>\USB Device - Bootloaders\HID - Bootloader\HID Bootloader -
Firmware for (microcontroller family
name)”. When commercializing a
product that will be using this bootloader, it is important to change the
VID/PID in both the firmware and the PC application source code.
In order
to use the bootloader, you will need to program a device with the bootloader
firmware. If using a Microchip demo
board, such as the PIC18F46J50 FS USB Demo Board (also known as “PIC18F46J50
PIM”) (www.microchipDIRECT.com part number MA180024), precompiled
demo .hex files can be used (without any modifications). These pre-compiled .hex files are located in
the “<Install Directory>\USB Precompiled Demos” folder. After the HID bootloader firmware (ex: the
.hex file named “USB Device - HID - HID Bootloader - C18 – PIC(device name).hex” has been programmed, continuously hold down the
relevant pushbutton on the demo board, and then tap and release the MCLR
pushbutton. After exiting from MCLR
reset, the bootloader firmware will make a quick check of the pushbutton I/O
pin state. If the pushbutton is pressed,
it will stay in the bootloader.
By
default, the I/O pin that gets checked after exiting from reset will be:
PICDEM
FS USB Demo Board (PIC18F4550 based): S2 (RB4) pushbutton
PIC18F46J50
FS USB Demo Board (aka PIM): S2 (RB2) pushbutton
PIC18F87J50
FS USB Demo Board (aka Plug-In Module/PIM): S4 (RB4) pushbutton
PIC24F256GB110
PIM: S3 on Explorer 16 (RD6) pushbutton
PIC32MX460F512L
PIM: S3 on Explorer 16 (RD6) pushbutton
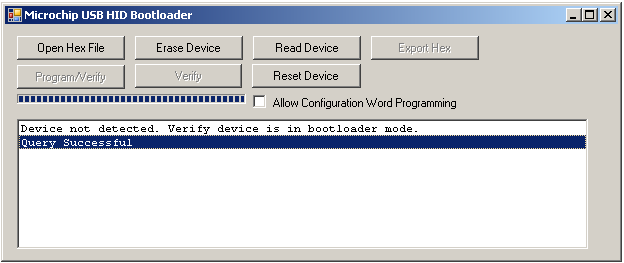
Assuming
that the device is connected correctly, and in bootload mode, the
HIDBootLoader.exe application should automatically detect the device. The application uses WM_DEVICECHANGE messages
in order to make for a smooth plug and play experience. Once the application detects the device, some
of the buttons in the application should automatically become enabled.
At this
point, “main application” firmware images can be loaded and programmed using
the bootloader. The main application
should not try to put code in addresses 0x00-0xFFF, because the bootloader will
not attempt to program these locations (which is where the bootloader firmware
resides). Therefore, when building the
main application hex files, a modified linker script should be used. The “rm18f87j50.lkr” file included in the
various USB device projects (such as in the “HID Mouse” project) shows an
example of how this can be done.
By
default, most of the pre-compiled demo .hex files (except for PIC32) are
pre-configured to be useable with the HID Bootloader. Therefore, the pre-compiled demo firmware
files, such as the “USB Device - HID - Mouse - C18 - PIC18F87J50 PIM.hex” can
be directly programmed with the bootloader.
After an
appropriate hex file has been programmed, simply reset the microcontroller
(without holding down the bootloader entry pushbutton) to exit the bootloader
and begin running the main application code.
The main application firmware should begin running.
NOTE:
The “USB Device - Mass Storage - SD Card reader” and “USB Device - Mass Storage
- SD Card data logger” demos make use of the SD Card PICtail™ Daughter Board
(Microchip Direct: AC164122). This
PICtail uses the RB4 I/O pin for the card detect (CD) signal when used with the
PIC18F87J50 FS USB Demo Board (PIM), and is actively driven by the
PICtail. The active drive overpowers the
pull up resistor on the RB4 pushbutton (on the PIC18F87J50 FS USB Demo
Board). As a result, if the PIC18F87J50
is programmed with the HID bootloader, and an SD Card is installed in the
socket when the microcontroller comes out of reset, the firmware will
immediately enter the bootloader (irrespective of the RB4 pushbutton
state). To exit the bootloader
firmware, remove the SD Card from the SD Card socket, and tap the MCLR
button. When the SD Card is not plugged
in, the PICtail will drive the card detect signal (which is connected to RB4)
logic high, which will enable the bootloader to exit to the main application
after coming out of reset. Once the main
application firmware is operating, the SD Card can be plugged in. The SD Card is “hot-swappable” and should be
recognized by the host upon insertion.
To avoid this inconvenience when using the bootloader with the PICtail,
it is suggested to modify the bootloader firmware to use some other I/O pin for
bootloader entry, such as RB0 (which has a pushbutton on it on the HPC Explorer
board).
Usage Tips:
Typically,
when downloading new firmware images into the microcontroller, the
configuration bit settings do not need to be modified. In some applications, it is sometimes
desirable to be able to program new configuration bit settings into the
microcontroller. Doing so entails a
small amount of risk however, since it is potentially possible to program a new
.hex file containing configuration bit settings that would be incompatible with
USB operation (for example, if the oscillator settings are completely
wrong). It is therefore generally
recommended not to check the “Allow Configuration Word Programming” check box,
unless strictly necessary. Special
considerations should be kept in mind regarding the “Allow Configuration Word
Programming” check box:
On
currently supported PIC18xxJxx
devices, the configuration words are stored in flash memory at the end of the
implemented program memory space.
However, the minimum erase page size is currently fixed at 1024 bytes
for the currently supported microcontrollers.
Therefore, if the “Allow Configuration Word Programming” box is left
unchecked, then the last page of program memory will not get erase and will not
get updated by the bootloader. If the
main application firmware .hex file contains program code on the last page of
implemented flash memory, it will not get updated. This can however be worked around, simply by
checking the “Allow Configuration Word Programming” check box. The bootloader firmware will then erase and
reprogram the last 1024 byte page of flash memory (which contains the
configuration words).
Important note concerning VID and
PID: When commercializing a product that will be using a USB
bootloader, always make sure to use a unique VID and PID combination. Do not use the default VID/PID combination
(from the bootloader firmware and PC application) in your commercialized product. If a PC has two devices, both containing the
same bootloader with VID/PID = 0x04D8/0x003C, one made by manufacturer A (ex: a
keyboard), and another device made by manufacturer B (ex: a CDC serial
emulation device), then it is not certain which device the HID Bootloader PC
application will connect to. The HID
Bootloader PC application will search the system for any devices attached with
matching VID/PID, but if there is more than one simultaneously attached, it will
connect to the first one it finds. This
could potentially lead to inadvertent flash updating of the wrong product,
leading to unexpected and undesired consequences. By using a unique VID/PID for each product
line of a given type, this ensures that the HID bootloader PC application will
only find the correct device. To change
the VID and PID in the bootloader firmware, simply change the USB device
descriptor and rebuild the firmware. To
change the HID Bootloader PC application, change the “MY_DEVICE_ID” string at
the top of Form1.h, so that the VID/PID matches the firmware and then rebuild
the project. The PC application is built
in Microsoft Visual C++ 2005 .NET express edition. Microsoft currently distributes the express
editions of Visual Studio languages for free download on their website.
MCHPUSB Bootloader:
The
“<install directory>\USB Device - Bootloaders\Vendor Class - MCHPUSB
Bootloader” bootloader is essentially the same as that which is distributed in
previous MCHPFSUSB v1.x distributions.
This bootloader is meant to be used with the PIC18F4550 family and
PIC18F4553 family of USB microcontrollers.
However, this bootloader is not recommended for new designs. It is recommended to use the HID Bootloader
instead, as the HID Bootloader is superior in many ways.
The
MCHPUSB Bootloader relies on the MCHPUSB custom (vendor) class general purpose
USB driver. This driver can be found in
the “<Install Directory>\USB Tools\MCHPUSB Custom Driver\MCHPUSB
Driver\Release” folder.
As
currently configured, the bootloader has the following characteristics:
Two USB Stacks Approach: The bootloader firmware contains
all of the code needed for self programming, as well as all of the necessary
code to enumerate as a custom (vendor) class USB device (which uses the
mchpusb.sys custom driver).
The
MCHPUSB bootloader firmware is an entirely stand alone MPLAB IDE based
project. The “main application” firmware
should be a separate MPLAB IDE based project altogether. The main application firmware is intended to
be entirely independent of the bootloader.
This requires that the main application should also contain a fully
functional and complete USB stack.
However, only one of the USB stacks is used at any given time.
With
this approach, the main application firmware need not be a custom class device
(nor does it need to be a “composite” device).
In order to switch between the main application and the USB bootloader,
the device “functionally detaches” itself from the USB bus (by temporarily
turning off the pull up resistor), and then re-enumerates as the other firmware
project.
Bootloader Entry Method:
As currently configured, the bootloader firmware resides in program
memory in address range 0x00-0x7FF.
Almost immediately after coming out of reset, the bootloader firmware checks
I/O pin RB4 (which happens to have a pushbutton attached to it on the PICDEM™
FS USB Demo Board). If the pushbutton is
not pressed, the bootloader will immediately exit the bootloader and go to the
main application firmware “reset vector”.
In other
words, the bootloader effectively does this:
//Device
powers up, and comes out of POR
if(RB4 pushbutton is not pressed) --> goto 0x800 //main application
“reset vector”
if(RB4 pushbutton is pressed) --> goto/stay in main bootloader project.
Effectively,
the “reset” vector for the main application firmware is at address 0x800. In the main application firmware project, the
user should place a “goto _startup” at address 0x800. This will allow the C initializer code to
execute, which will initialize things like the software stack pointers and any
user “idata” variables. For an example, see one of the USB device
firmware projects, such as the “HID - Mouse” project. The PICDEM FSUSB version of this project is
already configured to allow the generated .hex file to function along with the
USB bootloader project.
Vector Remapping:
As
currently configured, the bootloader occupies the address range 0x00-0x7FF,
which means it occupies the PIC18 reset, high priority, and low priority
interrupt vector locations. The
bootloader firmware itself does not enable or use interrupts. In order to make interrupts available for use
by the main application firmware, the interrupt vectors are effectively
“remapped” by placing goto instructions at the actual vector locations. In other words:
Address
0x08 (high priority interrupt vector), contains a “goto 0x808”.
Address
0x18 (low priority interrupt vector), contains a “goto 0x818”.
For
example, if a high priority interrupt is enabled and used in the main
application firmware, the following will occur:
1. Main application enables the interrupt
source.
2. Sometime later, the interrupt event occurs.
3. Microcontroller PC jumps to 0x08.
4. Microcontroller executes a “goto 0x808”.
5. Microcontroller executes the main application
interrupt handler routine, which has an entry point at address 0x808. (Note: The interrupt handler routine itself
might not be at address 0x808, but another bra/goto may be located at 0x808 to
get to the real routine)
Using the MCHPUSB Bootloader PC
Application: The MCHPUSB bootloader uses the PICDEM FS USB
Demo Tool (pdfsusb.exe) for downloading/programming new firmware images from
the PC. This program can be found in the following
directory: “<install directory>\USB Tools\Pdfsusb”. Documentation describing how to use this tool
is found in chapter 3 of the PICDEM FS USB Demo Board User’s Guide
(DS51526). This document can be found in
the following directory, “<install directory>\Microchip\USB\Documentation\Board
Information\51526b.pdf”. (Note: A newer
version of this document may exist, please check the Microchip website. The 51526b.pdf
version of the document is written with the assumption that the user is working
with MCHPFSUSB v1.x, which uses a somewhat different directory structure compared
to that of MCHPFSUSB v2.2)
Trademarks:
The Microchip
name and logo, the Microchip logo, MPLAB, and PIC are registered trademarks of
Microchip Technology Incorporated in the
PICDEM and PICtail are trademarks of Microchip
Technology Incorporated in the
Microsoft, Windows, Visual Studio, Visual C++, and Windows Vista
are either registered trademarks or trademarks of Microsoft Corporation in the